|
|
 제품소개
제품소개
|
 |
기존의 스크루 직교로봇(Cartesian Robot)은 Ball Recirculation(볼 리턴)방식을 사용하는 Ball Screw와 Linear Motion Guide를 사용하여 서보모터의 회전운동을 직선운동으로 변환시켜 일정한 중량물을 정밀한 직선상에서 위치제어를 합니다. 장거리이송전용 정밀직교로봇 Big-Ear는 볼스크류 대신 V홈으로 연삭된 오픈 스크류의 나사산에 볼베어링의 외륜을 좌우 2곳에서 구름운동시키고 Hardened & Ground shaft(열처리 연마봉) 상에 여러개의 Track Roller Bearing을 구름운동 시켜 서보모터의 회전운동을 직선운동으로 변환시켜 일정한 중량물을 정밀한 직선상에서 위치제어를 합니다. 고하중의 중량물을 저소음으로 열 발생을 최소화하며 부드럽게 주행하는 구조가 되었으며 Open Screw 타입의 장거리 이송용 정밀 직교로봇(LDL Robot)으로 탄생되었습니다. 이는 고가이면서 제어가 복잡한 리니어모터 방식의 LDL Robot을 대체하기도 하며 설치에 어려움을 겪는 Rack & Pinion 방식의 LDL Robot을 대체 할 수 있게 되었습니다. 구조가 단순해 졌으며 LDL Robot의 길이는 무한정 늘어나게 되었습니다. 유지보수의 안정성과 신뢰성이 높아지게 되니 4차산업혁명에 필요한 기술이 될 것입니다.
|
|
|
제품특징
|
 |
|
LDL Screw Robot의 핵심 기술!
|
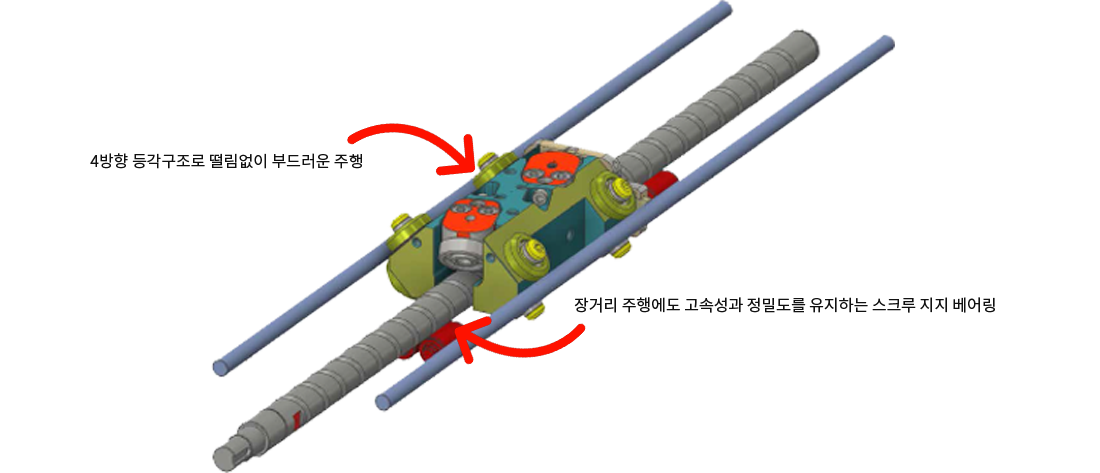
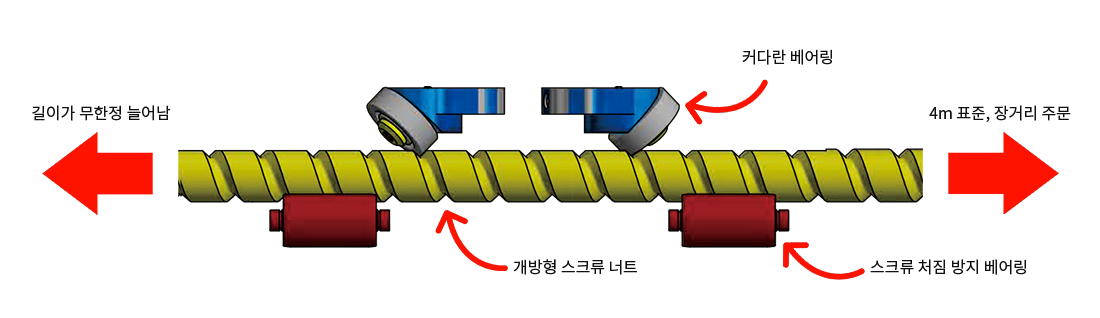
스크류 처짐 베어링(Screw Sag Bearings), 커다란 베어링(Big Ear Bearing), 개방형 스크류 너트(Open Screw)의 탄생으로 스크류가 길어도 처지지 않고 회전 속도는 모터 최고속도까지 높아지고 열발생은 최소화되는 구조가 되었습니다.
|
|
| 1 |
4000mm의 길이에서도 이송속도 2m/sec. 이상 |
4 |
반복정밀도는 ± 5㎛ 이내 |
| |
|
|
|
| 2 |
표준길이 4000mm(10m 이상 가능) |
5 |
동종 대비 컴팩트한 사이즈로 고 하중 |
| |
|
|
|
| 3 |
더 이상 처지지 않고 장거리 이송용 로봇을 만들 수 있다. |
6 |
매우 경쟁력 있는 가격과 저·소음 |
|
|
|
|
| 모델명 |
사용 용도 |
도면 다운로드 |
BE 180
(X-axis , Vertical 전용) |
50kg 이상의 가반 하중으로 장거리 고속 이송에 적합한 개방형 스크류 타입의 정밀 리니어 로봇
수직 이송에 최적화 되어 수직 이송 시 장기수명과 정밀도를 보장합니다. |
|
BE 125
(X-Y axis 전용) |
탑재 하중이 30kg 이상인 장거리 고속 이송에 적합한 개방형 스크류 타입의 정밀 리니어 로봇
콤팩트 한 타입으로 길지만 빠른 속도에 최적화되었습니다. |
|
BE 40
(Z-axis 전용) |
가이드 레일과 개방 나사가 통합 된 Z 축 전용, 바디 이송 방식에 최적화 된 초소형 정밀 선형 이송 로봇 |
|
BE 1K,2K,5K,10K
(고 하중 전용) |
10톤 이상되는 로봇 대차와 같이 중량 물 이송에 적합한 고 하중 정밀 선형로봇
4차산업에 필요한 스마트팩토리 생산라인에 적용될 수 있습니다.
기본 베이스가 제공되며 하중이나 속도등 사용환경에 따라 주문제작 합니다. |
|
|
|